6. Kesten Processes and Firm Dynamics#
GPU
This lecture was built using a machine with JAX installed and access to a GPU.
To run this lecture on Google Colab, click on the “play” icon top right, select Colab, and set the runtime environment to include a GPU.
To run this lecture on your own machine, you need to install Google JAX.
In addition to JAX and Anaconda, this lecture will need the following libraries:
!pip install quantecon
Show code cell output
Requirement already satisfied: quantecon in /home/runner/miniconda3/envs/quantecon/lib/python3.13/site-packages (0.10.1)
Requirement already satisfied: numba>=0.49.0 in /home/runner/miniconda3/envs/quantecon/lib/python3.13/site-packages (from quantecon) (0.61.0)
Requirement already satisfied: numpy>=1.17.0 in /home/runner/miniconda3/envs/quantecon/lib/python3.13/site-packages (from quantecon) (2.1.3)
Requirement already satisfied: requests in /home/runner/miniconda3/envs/quantecon/lib/python3.13/site-packages (from quantecon) (2.32.3)
Requirement already satisfied: scipy>=1.5.0 in /home/runner/miniconda3/envs/quantecon/lib/python3.13/site-packages (from quantecon) (1.15.3)
Requirement already satisfied: sympy in /home/runner/miniconda3/envs/quantecon/lib/python3.13/site-packages (from quantecon) (1.13.3)
Requirement already satisfied: llvmlite<0.45,>=0.44.0dev0 in /home/runner/miniconda3/envs/quantecon/lib/python3.13/site-packages (from numba>=0.49.0->quantecon) (0.44.0)
Requirement already satisfied: charset-normalizer<4,>=2 in /home/runner/miniconda3/envs/quantecon/lib/python3.13/site-packages (from requests->quantecon) (3.3.2)
Requirement already satisfied: idna<4,>=2.5 in /home/runner/miniconda3/envs/quantecon/lib/python3.13/site-packages (from requests->quantecon) (3.7)
Requirement already satisfied: urllib3<3,>=1.21.1 in /home/runner/miniconda3/envs/quantecon/lib/python3.13/site-packages (from requests->quantecon) (2.3.0)
Requirement already satisfied: certifi>=2017.4.17 in /home/runner/miniconda3/envs/quantecon/lib/python3.13/site-packages (from requests->quantecon) (2025.4.26)
Requirement already satisfied: mpmath<1.4,>=1.1.0 in /home/runner/miniconda3/envs/quantecon/lib/python3.13/site-packages (from sympy->quantecon) (1.3.0)
6.1. Overview#
This lecture describes Kesten processes, which are an important class of stochastic processes, and an application of firm dynamics.
The lecture draws on an earlier QuantEcon lecture, which uses Numba to accelerate the computations.
In that earlier lecture you can find a more detailed discussion of the concepts involved.
This lecture focuses on implementing the same computations in JAX.
Let’s start with some imports:
import matplotlib.pyplot as plt
import quantecon as qe
import jax
import jax.numpy as jnp
from jax import random
from jax import lax
from quantecon import tic, toc
from typing import NamedTuple
from functools import partial
Let’s check the GPU we are running
!nvidia-smi
Mon Nov 17 03:41:42 2025
+-----------------------------------------------------------------------------------------+
| NVIDIA-SMI 575.51.03 Driver Version: 575.51.03 CUDA Version: 12.9 |
|-----------------------------------------+------------------------+----------------------+
| GPU Name Persistence-M | Bus-Id Disp.A | Volatile Uncorr. ECC |
| Fan Temp Perf Pwr:Usage/Cap | Memory-Usage | GPU-Util Compute M. |
| | | MIG M. |
|=========================================+========================+======================|
| 0 Tesla T4 Off | 00000000:00:1E.0 Off | 0 |
| N/A 31C P8 13W / 70W | 0MiB / 15360MiB | 0% Default |
| | | N/A |
+-----------------------------------------+------------------------+----------------------+
+-----------------------------------------------------------------------------------------+
| Processes: |
| GPU GI CI PID Type Process name GPU Memory |
| ID ID Usage |
|=========================================================================================|
| No running processes found |
+-----------------------------------------------------------------------------------------+
6.2. Kesten processes#
A Kesten process is a stochastic process of the form
where
We are interested in the dynamics of
We will focus on the nonnegative scalar case, where
In particular, we will assume that
the initial condition
6.2.1. Application: firm dynamics#
In this section we apply Kesten process theory to the study of firm dynamics.
6.2.1.1. Gibrat’s law#
It was postulated many years ago by Robert Gibrat that firm size evolves according to a simple rule whereby size next period is proportional to current size.
This is now known as Gibrat’s law of proportional growth.
We can express this idea by stating that a suitably defined measure
for some positive IID sequence
Subsequent empirical research has shown that this specification is not accurate, particularly for small firms.
However, we can get close to the data by modifying (6.2) to
where
We now study the implications of this specification.
6.2.1.2. Heavy tails#
If the conditions of the Kesten–Goldie Theorem are satisfied, then (6.3) implies that the firm size distribution will have Pareto tails.
This matches empirical findings across many data sets.
But there is another unrealistic aspect of the firm dynamics specified in (6.3) that we need to address: it ignores entry and exit.
In any given period and in any given market, we observe significant numbers of firms entering and exiting the market.
In this setting, firm dynamics can be expressed as
The motivation behind and interpretation of (6.4) can be found in our earlier Kesten process lecture.
What can we say about dynamics?
Although (6.4) is not a Kesten process, it does update in the
same way as a Kesten process when
So perhaps its stationary distribution still has Pareto tails?
We can investigate this question via simulation and rank-size plots.
The approach will be to
generate
plot the largest 1,000 of the resulting draws in a rank-size plot.
(The distribution of
In the simulation, we assume that each of
Here’s a class to store parameters:
class Firm(NamedTuple):
μ_a: float = -0.5
σ_a: float = 0.1
μ_b: float = 0.0
σ_b: float = 0.5
μ_e: float = 0.0
σ_e: float = 0.5
s_bar: float = 1.0
Here’s code to update a cross-section of firms according to the dynamics in (6.4).
@jax.jit
def update_cross_section(s, a, b, e, firm):
μ_a, σ_a, μ_b, σ_b, μ_e, σ_e, s_bar = firm
s = jnp.where(s < s_bar, e, a * s + b)
return s
Now we write a for loop that repeatedly calls this function, to push a cross-section of firms forward in time.
For sufficiently large T, the cross-section it returns (the cross-section at
time T) corresponds to firm size distribution in (approximate) equilibrium.
def generate_cross_section(
firm, M=500_000, T=500, s_init=1.0, seed=123
):
μ_a, σ_a, μ_b, σ_b, μ_e, σ_e, s_bar = firm
key = random.PRNGKey(seed)
# Initialize the cross-section to a common value
s = jnp.full((M, ), s_init)
# Perform updates on s for time t
for t in range(T):
key, *subkeys = random.split(key, 4)
a = μ_a + σ_a * random.normal(subkeys[0], (M,))
b = μ_b + σ_b * random.normal(subkeys[1], (M,))
e = μ_e + σ_e * random.normal(subkeys[2], (M,))
# Exponentiate shocks
a, b, e = jax.tree.map(jnp.exp, (a, b, e))
# Update the cross-section of firms
s = update_cross_section(s, a, b, e, firm)
return s
Let’s try running the code and generating a cross-section.
firm = Firm()
tic()
data = generate_cross_section(firm).block_until_ready()
toc()
TOC: Elapsed: 0:00:2.43
2.4374115467071533
We run the function again so we can see the speed without compile time.
tic()
data = generate_cross_section(firm).block_until_ready()
toc()
TOC: Elapsed: 0:00:0.87
0.8796219825744629
Let’s produce the rank-size plot and check the distribution:
fig, ax = plt.subplots()
rank_data, size_data = qe.rank_size(data, c=0.01)
ax.loglog(rank_data, size_data, 'o', markersize=3.0, alpha=0.5)
ax.set_xlabel("log rank")
ax.set_ylabel("log size")
plt.show()
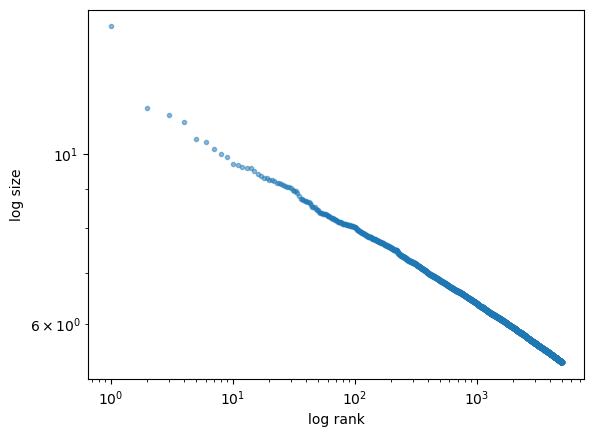
The plot produces a straight line, consistent with a Pareto tail.
6.2.1.3. Alternative implementation with lax.fori_loop#
Although we JIT-compiled some of the code above,
we did not JIT-compile the for loop.
Let’s try squeezing out a bit more speed by
replacing the
forloop withlax.fori_loopandJIT-compiling the whole function.
Here a the lax.fori_loop version:
@jax.jit
def generate_cross_section_lax(
firm, T=500, M=500_000, s_init=1.0, seed=123
):
μ_a, σ_a, μ_b, σ_b, μ_e, σ_e, s_bar = firm
key = random.PRNGKey(seed)
# Initial cross section
s = jnp.full((M, ), s_init)
def update_cross_section(t, state):
s, key = state
key, *subkeys = jax.random.split(key, 4)
# Generate current random draws
a = μ_a + σ_a * random.normal(subkeys[0], (M,))
b = μ_b + σ_b * random.normal(subkeys[1], (M,))
e = μ_e + σ_e * random.normal(subkeys[2], (M,))
# Exponentiate them
a, b, e = jax.tree.map(jnp.exp, (a, b, e))
# Pull out the t-th cross-section of shocks
s = jnp.where(s < s_bar, e, a * s + b)
new_state = s, key
return new_state
# Use fori_loop
initial_state = s, key
final_s, final_key = lax.fori_loop(
0, T, update_cross_section, initial_state
)
return final_s
Let’s see if we get any speed gain
tic()
data = generate_cross_section_lax(firm).block_until_ready()
toc()
TOC: Elapsed: 0:00:1.04
1.0461056232452393
tic()
data = generate_cross_section_lax(firm).block_until_ready()
toc()
TOC: Elapsed: 0:00:0.06
0.061226844787597656
Here we produce the same rank-size plot:
fig, ax = plt.subplots()
rank_data, size_data = qe.rank_size(data, c=0.01)
ax.loglog(rank_data, size_data, 'o', markersize=3.0, alpha=0.5)
ax.set_xlabel("log rank")
ax.set_ylabel("log size")
plt.show()
6.3. Exercises#
Exercise 6.1
Try writing an alternative version of generate_cross_section_lax() where the entire sequence of random draws is generated at once, so that all of a, b, and e are of shape (T, M).
(The update_cross_section() function should not generate any random numbers.)
Does it improve the runtime?
What are the pros and cons of this approach?
Solution to Exercise 6.1
@jax.jit
def generate_cross_section_lax(
firm, T=500, M=500_000, s_init=1.0, seed=123
):
μ_a, σ_a, μ_b, σ_b, μ_e, σ_e, s_bar = firm
key = random.PRNGKey(seed)
subkey_1, subkey_2, subkey_3 = random.split(key, 3)
# Generate entire sequence of random draws
a = μ_a + σ_a * random.normal(subkey_1, (T, M))
b = μ_b + σ_b * random.normal(subkey_2, (T, M))
e = μ_e + σ_e * random.normal(subkey_3, (T, M))
# Exponentiate them
a, b, e = jax.tree.map(jnp.exp, (a, b, e))
# Initial cross section
s = jnp.full((M, ), s_init)
def update_cross_section(t, s):
# Pull out the t-th cross-section of shocks
a_t, b_t, e_t = a[t], b[t], e[t]
s = jnp.where(s < s_bar, e_t, a_t * s + b_t)
return s
# Use lax.scan to perform the calculations on all states
s_final = lax.fori_loop(0, T, update_cross_section, s)
return s_final
Here are the run times.
tic()
data = generate_cross_section_lax(firm).block_until_ready()
toc()
TOC: Elapsed: 0:00:1.00
1.0009338855743408
tic()
data = generate_cross_section_lax(firm).block_until_ready()
toc()
TOC: Elapsed: 0:00:0.05
0.058072805404663086
This method might or might not be faster.
In general, the relative speed will depend on the size of the cross-section and the length of the simulation paths.
However, this method is far more memory intensive.
It will fail when